JIS・ISOの流れ
外装安全は、確かめる時代へ
外装安全は、見た目や印象だけで語るものではありません。
その評価方法は、国内ではJISとして整理され、国際ではISOの流れへ進み始めています。
外装安全は、確かめる方法が必要になります
外装安全が大切だと言うだけでは、十分ではありません。
ぶつかったときに何が起こるのか。
ぶつかったことをどれだけ早く見つけられるのか。
それを、同じ考え方で確かめる方法が必要です。
そのため、外装安全の評価方法は、国内ではJISとして整理され、
さらに国際標準化の流れにも進み始めています。
なぜ、評価方法が必要なのか
外装安全は、見た目や印象だけでは比べられません。
「やわらかそう」「安全そう」という言葉だけでは、設計の根拠になりにくいからです。
本当に必要なのは、ぶつかったときの安全を、どのように確かめるかです。
何を測るのか。
どんな条件で確かめるのか。
どう比べるのか。
国内では、JISとして整理されています
日本では、衝撃吸収型接触検知外装カバーの性能試験方法が、JIS B 8451-1 として整理されています。
この規格は、ロボット全体の安全を決めるものではありません。
対象は、衝撃吸収と接触検知が一体になった外装カバーです。
つまり、外装安全をどのように確かめるかを整理した、外装カバーのための性能試験方法です。
何を確かめるのか
この評価方法では、たとえば次のようなことを確かめます。
- ぶつかったときに、どれだけ衝撃を小さくできるか
- ぶつかったことを、どれだけ早く見つけられるか
- 外装としての機能が、きちんと成立しているか
外装安全は、ただやわらかいだけでは足りません。
衝撃を小さくすることと、接触を見つけることの両方が大切です。
国際標準化の流れも始まっています
外装安全の評価方法は、日本だけの話ではありません。
人と同じ空間で動くロボットが増える中で、外装の安全をどう確かめるかは、世界でも共通の課題になっています。
そのため、国内で整理された考え方をもとに、国際標準化の流れも進み始めています。
現在、衝撃吸収型接触検知外装カバーの性能試験方法は、ISO/NP 26305-1 として国際標準化の検討が進められています。
JISからISOへつながる意味
JISは、日本の中で評価方法を整理するための大切な土台です。
そしてISOは、その考え方を国際的な共通ルールへ広げていく流れです。
つまり、
外装安全は、国内だけで閉じた話ではなく、
これから広く共有されていく設計テーマになりつつあります。
評価方法とともに示す時代へ進み始めています。
規格があると、何が変わるのか
規格があることで、外装安全は
「やわらかそうだから安全」ではなく、
「どのように確かめたか」で説明しやすくなります。
これは、設計する側にとっても、使う側にとっても大切です。
何を目標にするのか。
どのように確認するのか。
どこを比較するのか。
その考え方を共有しやすくなるからです。
規格は、製品を飾るためのものではありません。
外装安全を、設計条件として考えるための土台です。
こうした流れに対応する構造が必要になります
外装安全を確かめる考え方が整理されると、
その要求に応える外装構造も必要になります。
ぶつかったときの衝撃を小さくすること。
ぶつかったことを見つけること。
その両方を外装として成立させること。
次のページでは、
こうした要求に対して、どのような構造があるのかを紹介します。
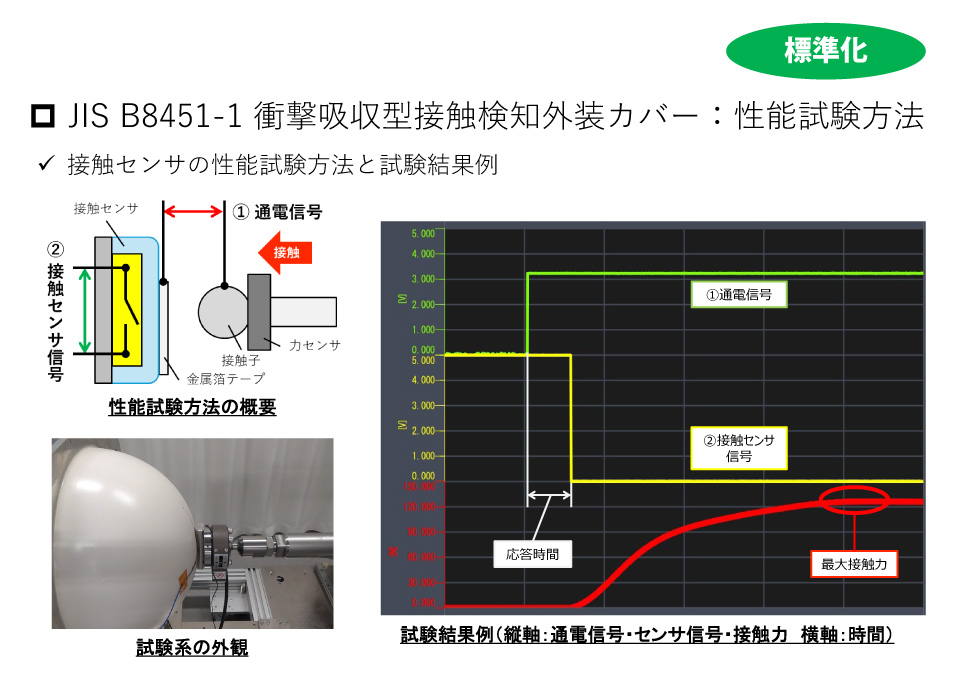
衝撃吸収型接触検知外装カバーの性能試験方法
YaWaRaKaロボD(衝撃吸収型接触検知外装カバー)に代表されるような衝撃吸収性と接触検知機能を一体化した外装カバー部品について、その性能を客観的かつ定量的に評価するための試験方法として、日本産業規格 JIS B8451-1 が制定されました。
本規格は、ロボット本体やシステム全体の挙動を評価するものではなく、外装カバー単体を対象とした「性能試験方法」を定めた規格です。
構造・材料・検知原理が異なっていても、衝撃吸収性と接触検知が一体となった外装カバーであれば測定対象となります。
JIS B8451-1 では、主に以下の性能を定量的に測定します。
【外装カバーに 一定量(mm)の変位(押し込み)を与えた際に】
クッション性(衝撃吸収)によって力がどの程度緩和され、力覚センサーがどれほどの力(N)を検知するか
【カバー表面に物体が接触した瞬間 をトリガーとして】
そこから 信号が出力されるまでに要する応答時間
これにより、「やわらかさ」や「感覚的な安全性」ではなく、変位量・検知力・応答時間といった客観的指標に基づく性能評価が可能となります。
当社が開発してきたYaWaRaKaロボD(衝撃吸収型接触検知外装カバー) は、このような測定思想を前提として設計されており 人を含むあらゆる物体との接触時に、衝撃を吸収しつつ、速やかに検知信号を出力する構造を有しています。
また、本規格は世界に先駆けて制定されたものであり、今後、同様の機能を持つ外装カバーやセンサー技術が登場した場合でも、共通の評価基準で性能を比較・説明できる枠組みを提供します。
これにより、ロボット外装安全技術の透明性向上と、ロボット産業全体の健全な発展、国際競争力の強化に資することが期待されています。
接触センサの性能試験方法と試験結果例
参考情報
日本産業標準調査会(JISC)のホームページ 🔗より「B8451-1」で検索すると、規格本文を閲覧できます。
参考リンク
経済産業省ニュースリリース
「サービスロボットの周囲への接触を検知するカバーについて、その性能試験方法に関するJISを制定しました」
https://www.meti.go.jp/press/2022/03/20230320003/20230320003.html 🔗

- YaWaRaKaロボD
- JIS・ISO