YaWaRaKaロボD
YaWaRaKaロボDは、
衝撃吸収と接触検知を一体で
成立させる外装構造です。
既製品ではなく、ロボットの用途や形状、
要求性能に応じて
設計・試作・検証を通じて具体化します。
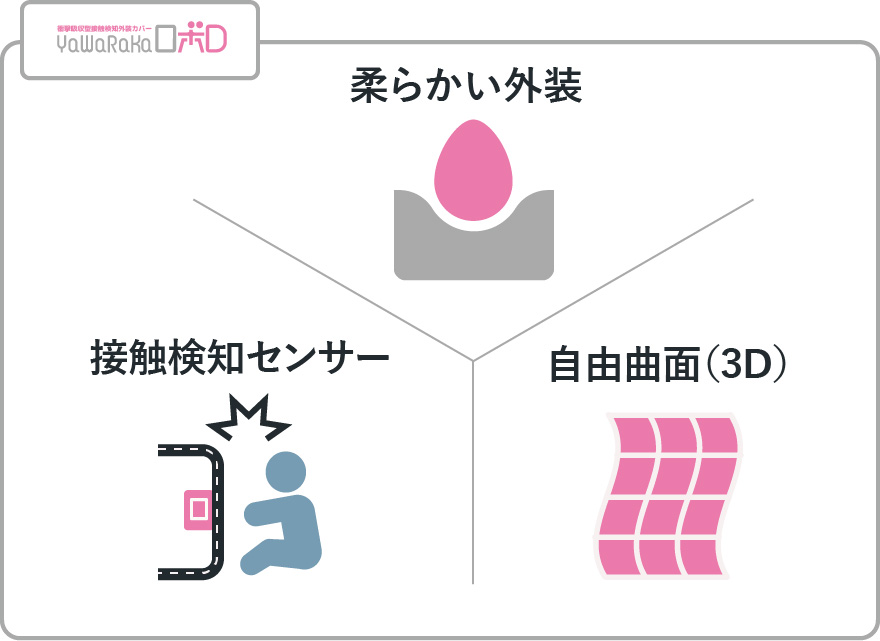

クッション性のある柔らか素材

柔らかさ=安全について、
衝撃からの安全性アップ
表面材にはクッション性を持つ材料を用いることができ、接触時の痛みや被害を低減する方向で設計することが可能です。
クッション性は用途に応じて調整できます。
色や形を自由にカスタマイズ可能

綺麗さ=意匠性について、
視覚デザインの向上
意匠性と安全性を分けずに扱うことも、外装設計上の重要な論点です。
形状や表面意匠の要求に対応しながら、外装安全を成立させる方向で設計検討を行います。
相対的な優位性

1個の素子で全体的・広範囲に
センシングが可能
1個の素子で広範囲を検知する構造により、外装全体をセンシング面として扱う考え方が可能です。
1m×1mの面積において、1個の素子でmsレベルの検知を確認した実績があります。それ以上の適用範囲については、用途と構造条件に応じた個別検証が必要です。

3D形状(自由曲面)でも
センシングが可能
3D形状や自由曲面を持つロボット外装に対して、外装全体をセンシング面として扱う構造をとることができます。
3D形状にツンツン、バンバン、衝撃検証実験

繰返し接触による
断線はありません
繰返し接触や局所負荷を想定した構造検討により、断線リスクを抑える考え方を採用しています。
センサー比較
本比較は、各方式の優劣を示すものではなく、ロボットの用途や設計条件に応じた構造選定のための整理です。
| YaWaRaKaロボD | テープ状スイッチ | シート状感圧センサー | |
|---|---|---|---|
| 広範囲検知 | |||
| 高速応答 | |||
| 衝撃吸収 | |||
| 親和性 | |||
| カスタマイズ性 | |||
| コスト(面積比) | |||
| 公共エリアで稼働 |
第三者機関による「安全認証」の取得

国内・国外の複数件の特許を
取得しています
国内・国外にて特許を複数件取得済みです。
また開発中のアイデアなども出願にむけて準備中であり無形資産を重要視しています。
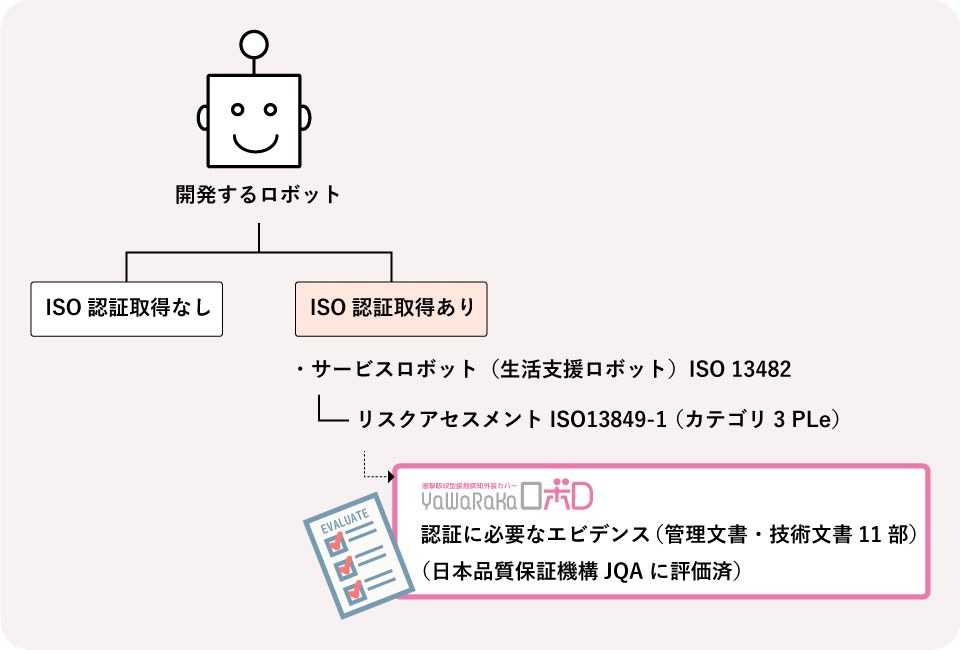
安全認証に対応した
評価レポートを取得
安全認証に必要な考え方や文書構成について、第三者評価に基づく整理を進めています。
認証に必要なエビデンス「管理文書」と「技術文書」があるので「0」ベースでの構築が必要なく、安全認証の取得が可能となります。
・ターゲットスコープはISO13849-1(カテゴリ3 PLe)
詳しくはページ下記をご覧ください。
※弊社の接触検出ソフトカバーは固有のロボットにより形状を変えてしまうため、この段階では製品安全認証が相応しくないので、自由に形を変えた時にでも製品安全認証が取得出来る事をご理解頂くために、あえて評価レポートとしています。
あらゆる柔軟材料に対して最適な加工方法を発見
簡易型で試作や少量生産に対応し
金型で大量生産も可能
近年では3Dプリンターなど先端技術の物作りもありますが、YaWaRaKaロボDは汎用的な技術で製造する事が可能であり製造方法も確立されています。
主に試作の段階では樹脂製の簡易型を使用し、いざ量産に移行する時にはアルミ型にて対応します。
お客様ごとの案件に
カスタマイズする事が可能
用途や設計条件に応じて、構造、材料、形状、実装方法を個別に設計対応します。
ロボットによる安全な生活環境を提供
衝撃吸収接触センサーYaWaRaKaロボDは、既製品ではなく、ユーザーのニーズに合わせてオンリーワンのアイテムへと進化するため、あらゆる現場やシーンで安全性・安定性・経済性・制御性を向上・促進させます。
 製造・工場
製造・工場 医療・福祉
医療・福祉 学校・教育
学校・教育 空港・運輸
空港・運輸 建物・ビルメンテナンス
建物・ビルメンテナンス 飲食・サービス
飲食・サービス
安全認証をお考えの方へ
認証に必要なエビデンスがあるため「0」ベースでの構築が必要なく、
安全認証を取得が可能となります。
別途ご相談ください。
YaWaRaKaロボDは安全認証に必要な「管理文書」と「技術文書」をひな形としてご用意しており、その妥当性を日本品質保証機構JQAに評価して頂き、その証として評価レポートを発行して頂いています。
ターゲットスコープ:ISO13849-1(カテゴリ3 PLe)
※各ロボットにおいて部分的に内容を改変する必要が有ります。
文書内容
【管理文書】
- 接触検出ソフトカバー要求仕様書
- コントローラー制御アルゴリズム要求仕様書
【技術文書】
- カバーの概要について
- 接触検出ソフトカバー製品コンセプト書★
- 安全設計について
- 接触検出ソフトカバー安全マニュアル★
- 安全設計のエビデンスとして
- 故障モード影響解析結果報告書★
- ハードウェア安全分析報告書★
- 製品検査について
- 接触検出ソフトカバー性能測定テスト仕様書
- 接触検出ソフトカバー性能測定テスト手順書兼結果報告書
- 標準セル測定結果
- 接触検出ソフトカバー検査結果報告書
- 校正証書類

- YaWaRaKaロボD